Challenge Design Document
Challenge Design Outline
Lab 6 Writeup
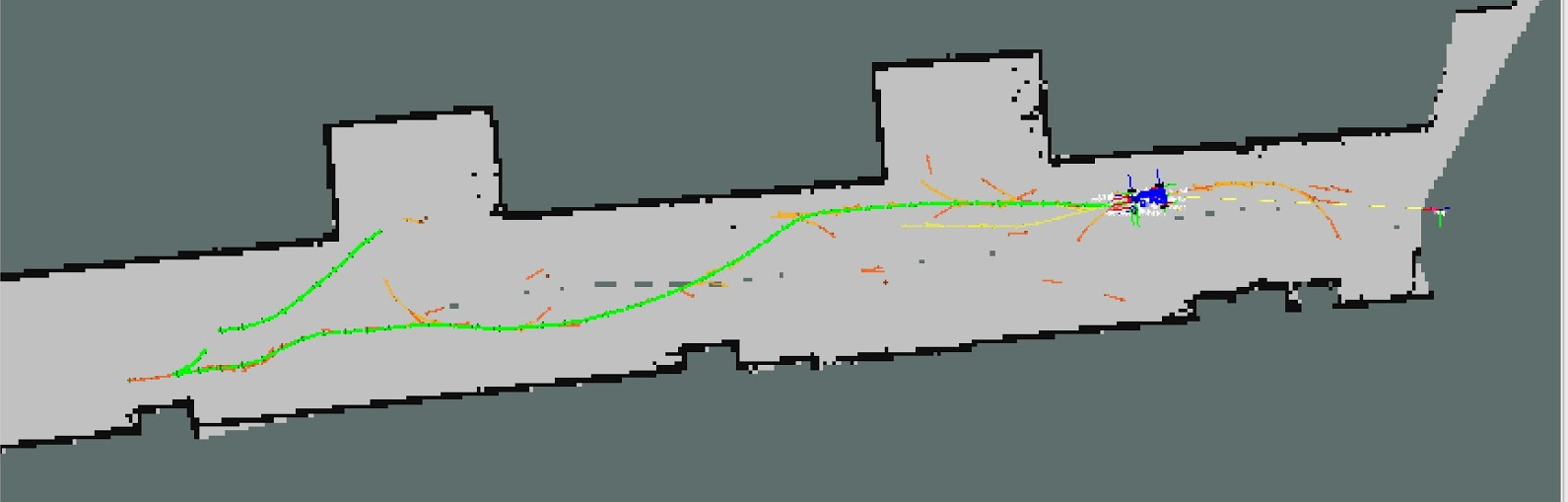
Our goal for this lab was to create a path planning algorithm that could navigate the robot down a corridor whilst avoiding obstacles. To achieve this, our team implemented a Rapidly-exploring Random Tree (RRT) algorithm and made modifications to our previous path following algorithm. Our final results were that we were able to drive down a hallway in the Gazebo simulator using a pre-recorded map-file.
Lab 6 Slides
The PDF of the slides can be found [here].
»Lab 5 Writeup
There were three primary goals for this lab. These were:
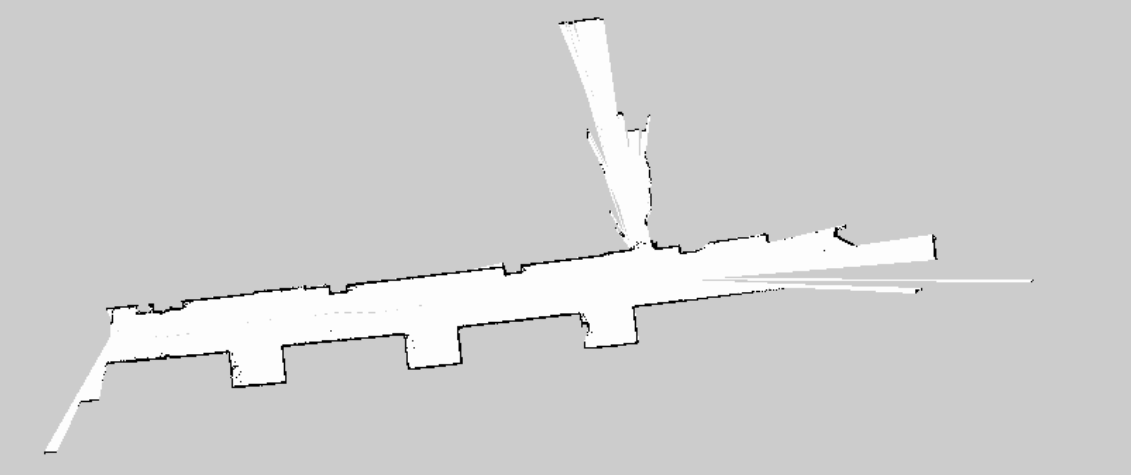
- Mapping: Collect
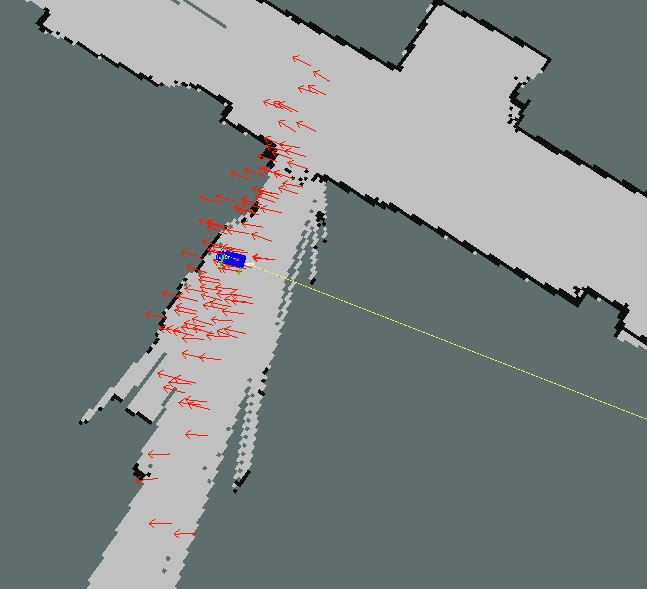
Odometry,LaserScan, andTransformdata with the racecar, in order to create a map on the VM. Do this using existing tools within the ros infrastructure - Localization: Using the pre-recorded map information, create a particle filter to find the pose of the racecar using realtime
OdometryandLaserScandata. - Control: Given a preset path, design a controller which causes the robot to follow the path.
Lab 5 Slides
The PDF of the slides can be found [here].
»Lab 4 Writeup
In this lab, the goal was to use the cameras on the racecar to navigate around a bright orange cone. This entailed writing computer vision code to identify the cone, and a controller to weave around the cones smoothly
Lab 4 Slides
The PDF of the slides can be found [here].
»Lab 3 Writeup
In this week’s lab, the goal was to create a rudimentary pipeline for following a wall while checking for collisions in front. To accomplish this, we divided the task into natural functionality segments both to better organize our code structure as well as to add modularity for future functionality to build off of. In addition, we continued to add infrastructure to make writing ROS code with good practices easier.
»Lab 3 Slides
The PDF of the slides can be found [here].
»Lab 2B Writeup
Lab 2B was focused on setting up the team’s tools and environment in order to effectively develop software for the robot. Several tasks involved setting up the software development environment on the user end in order to facilitate communication, and code-sharing between team members and with the staff, while others involved setting up the software on the physical robot in order to work correctly.
»Lab 2b Slides
The PDF of the slides can be found [here].
»